
Hi there! I am currently a second-year Master’s student in Automation and Engineering at Zhejiang University, focusing on Motion Planning, Autonomous Exploration, and Reinforcement Learning. Welcome to follow my works in Google Scholar or contact me via email tianclai@zju.edu.cn.
Now I am currently engaged in research at FAST-Lab, under the supervision of Professor Yanjun Cao (曹燕军) and Chao Xu (许超). You can visit our lab at FAST-FIRE.
📝 Publications
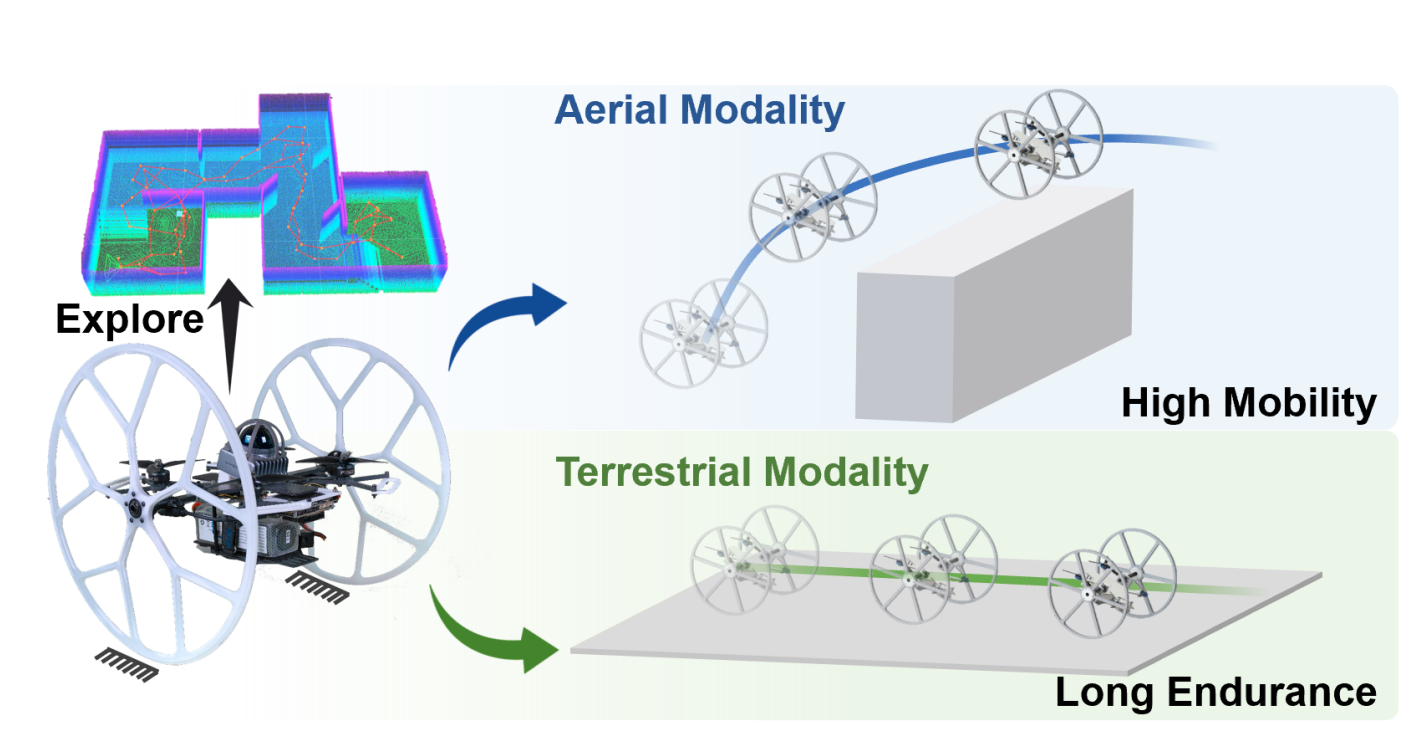
Autonomous exploration with terrestrial-aerial bimodal vehicles
Yuman Gao*, Ruibin Zhang*, Tiancheng Lai*, Yanjun Cao, Chao Xu, Fei Gao
In this paper, we develop a hierarchical scheme to drive the TABV to explore under given energy and time budget. With this scheme, the TABV can flexibly respond to different environments and energy/time constraints by changing the modality.
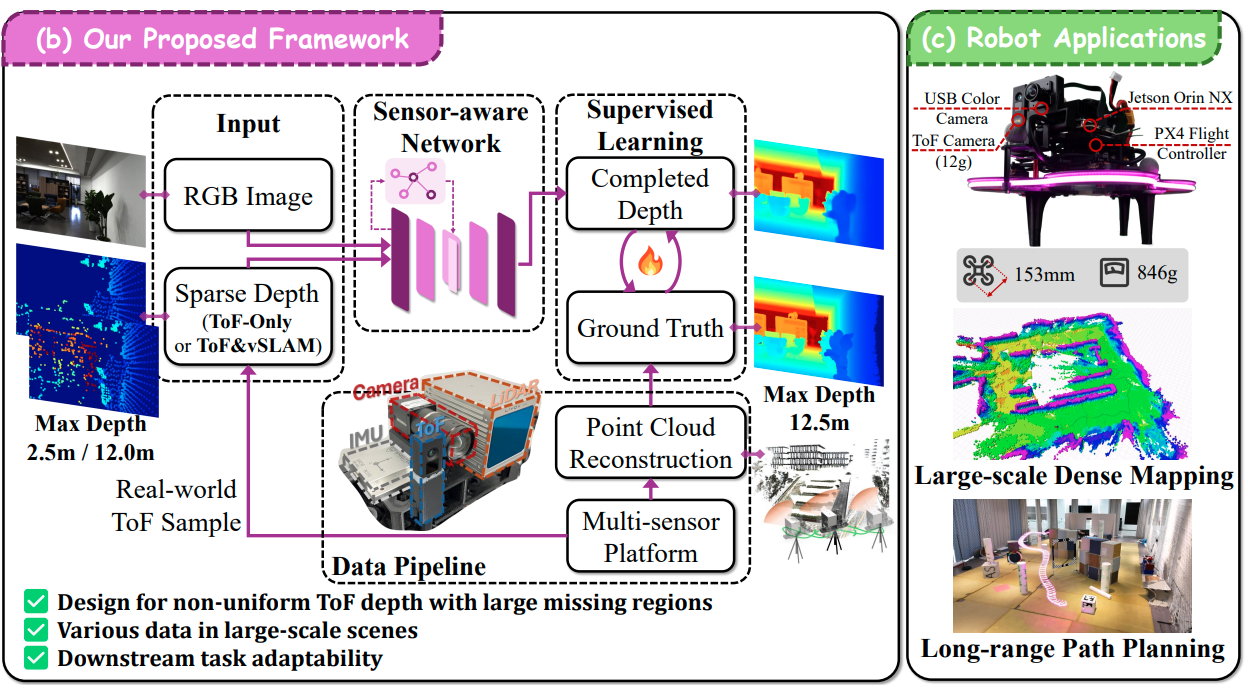
ToFormer: Towards Large-scale Scenario Depth Completion for Lightweight ToF Camera
Juncheng Chen, Tiancheng Lai, Xingpeng Wang, Bingxin Liao, Baozhe Zhang, Chao Xu, and Yanjun Cao
We present ToFormer, an innovative framework to overcome the range limitation of ToF cameras, along with LASER-ToF, the first dataset and benchmark for large-scale ToF depth completion. By featuring a novel network architecture that captures long-range relationships and performs efficient 3D-2D fusion, ToFormer significantly expands the sensing range of lightweight ToF cameras with advanced accuracy.
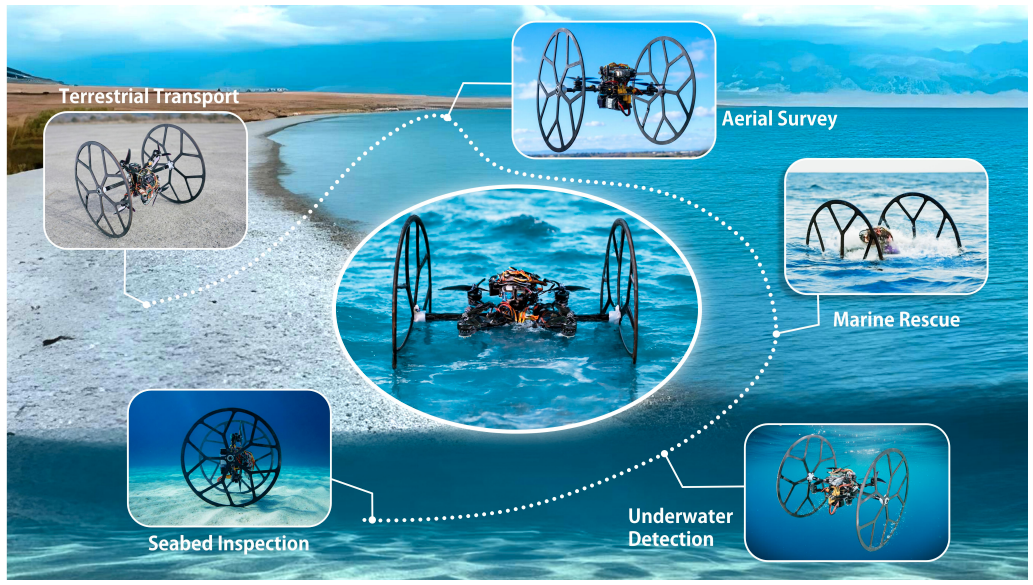
-TriphiBot: A Triphibious Robot Combining FOC-based Propulsion with Eccentric Design
Xiangyu Li, Mingwei Lai, Mengke Zhang, Junxiao Lin, Tiancheng Lai, Junping Zhi, Chao Xu, Fei Gao, Yanjun Cao
This paper presents a novel triphibious robot capable of aerial, terrestrial, and aquatic motion, by a minimalist design combining a quadcopter structure with two passive wheels, without extra actuators. By utilizing an eccentric CoG design and a unified FOC propulsion system, the robot achieves high efficiency and cross-domain transitions. A HNMPC-PID controller further ensures stable maneuverability across diverse domains.
📝 Ongoing Works
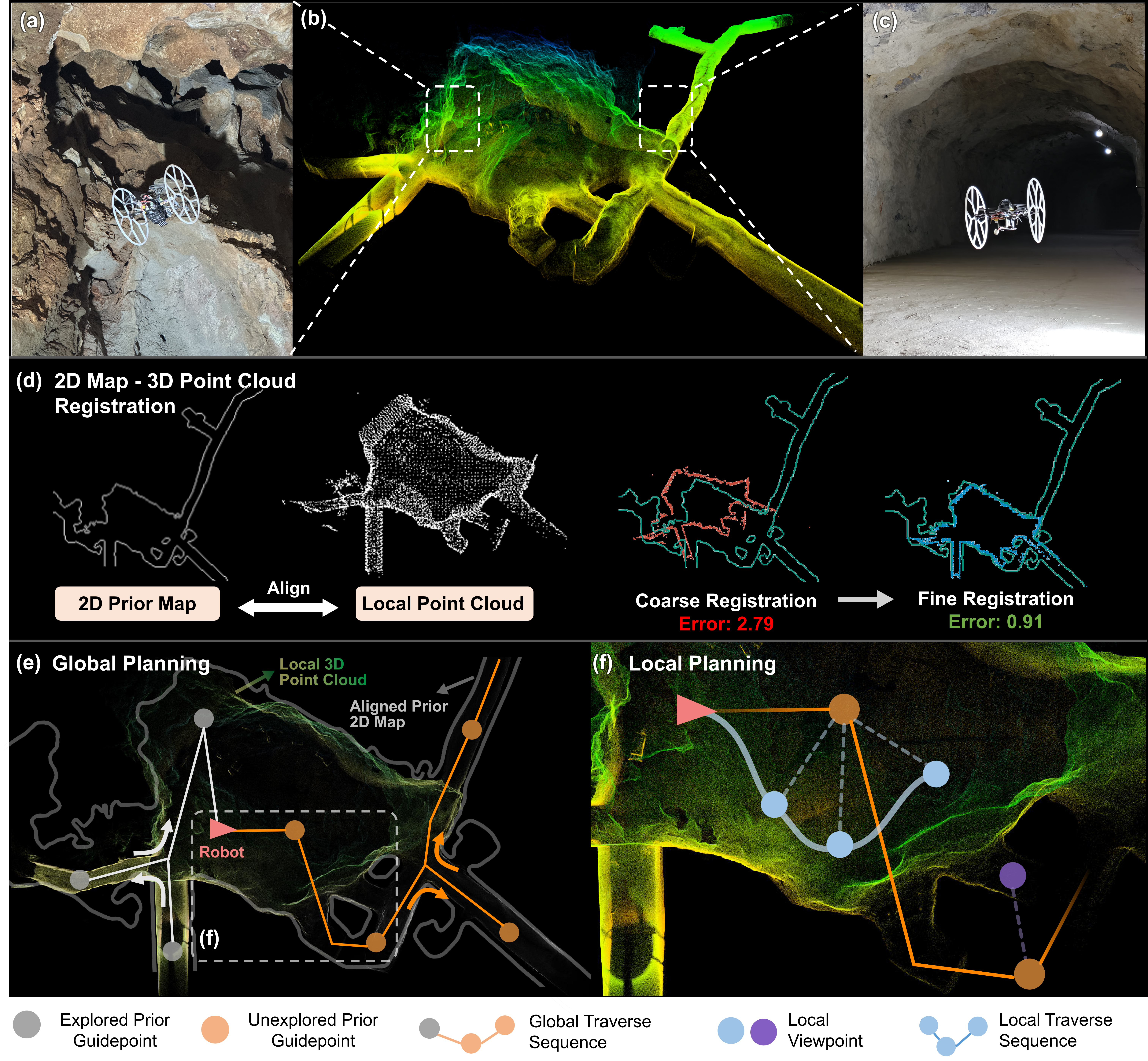
Tiancheng Lai*, Yuman Gao*, Xiangyu Li, Ruitian Pang, Xingpeng Wang, Siqi Shen, Mengke Zhang, Chao Xu, Fei Gao, and Yanjun Cao
This paper presents a novel exploration framework that leverages sparse, unaligned, and potentially discrepant 2D prior maps for LiDAR-based UAV exploration. We first propose a robust 2D-3D registration pipeline combining a sequential-aware GeoContext descriptor, multi-frame verification, and Scale-ICP to align observations and handle map discrepancies. Furthermore, we develop a hierarchical MCTS-based viewpoint planning strategy under multiple registration hypotheses. To mitigate uncertainties, a risk-aware selector evaluates the best prior sequence, and an FE-TSP is formulated to generate an efficient local coverage path.

FLAP: FOV-Constrained Active Perception Planning for Prior-Map-Free 3D Navigation
Mengke Zhang, Sitong Li, Tiancheng Lai, Ruitian Pang, Mingxuan Zhang, Chao Xu, Fei Gao, Yanjun Cao
In this paper, we present a trajectory optimization framework that integrates active perception into UAV planning for 3D unknown environments with restricted sensor FOV. We formulate visibility and safety criteria in the sensor frame and introduce parameterized active perception segments with velocity-dependent activation functions. This approach promotes early exploration of unknown spaces while maintaining dynamic feasibility and computational efficiency. Extensive simulations and real-world experiments show that the planner can generate smooth trajectories while maintaining safety and efficiency, and that it performs better than the baselines in the presented scenarios.
📖 Educations
- 2024.09 - 2027.06 (expected), Matser in Automation and Engineering at Zhejiang University.
- 2020.09 - 2024.06, bachelor in Automation and Engineering at Harbin Institute of Technology, ShenZhen (HITSZ).